

Besturing
In dit hoofdstuk zal worden gekeken naar de factoren die van invloed zijn op de besturing van de fiets, waarna vervolgens diverse besturingsmechanismes worden besproken.
Besturing voertuig
Voor de besturing van een voertuig is het enerzijds van belang dat het voertuig snel reageert op een stuurbeweging. Anderzijds dient het stuurgedrag ook stabiel te zijn. In dit hoofdstuk zal worden gekeken welke factoren van invloed zijn op het stuurgedrag van een voertuig.
Voor de stabiliteit in het stuurgedrag is het van belang dat een voertuig naloop heeft. Naloop wil zeggen dat de projectielijn van het balhoofd voor het contactpunt van het wiel loopt, zoals te zien is in Figuur 1. De naloop werkt als stabilisator van het stuurgedrag. Hoe groter de naloop is, hoe gemakkelijker het voertuig rechtdoor rijd en hoe stabieler het voertuig dus rijdt. Een naloop is erg positief voor de stabiliteit van het stuurgedrag. Het is echter niet gewenst dat de naloop te groot wordt. Het voertuig wordt hierdoor slecht bestuurbaar, doordat de naloop stuuruitslagen corrigeert waardoor het voertuig voortdurend rechtdoor wilt rijden.
Als het voertuig geen negatieve naloop heeft, heeft deze geen eigen stabiliteit meer. Als de naloop negatief is, is er sprake van voorloop. Het voertuig stuurt dan zichzelf en zal het voertuig alle kanten op willen, behalve rechtdoor, waardoor te allen tijde het voertuig gecorrigeerd dient te worden.

Om de stabiliteit van het voertuig en dus de naloop te achterhalen, zijn de volgende afmetingen van belang: wieldiameters (D), vorksprong (V) en de balhoofdhoek (B), zie figuur 2. De voorsprong kan verkregen worden door een vorkdoorbuiging, zoals te zien is in figuur 2, of door de voorvork voor het balhoofd te plaatsen.
Bovenstaande factoren hebben invloed op de naloop (N) en de effectieve naloop (M) van het voertuig. De effectieve naloop is van invloed op de stabiliteit van het voertuig.
De naloop en de effectieve naloop kunnen als volgt berekend worden:
M = (0,5 . D . cos B - V )
N = (0,5 . D . cos B - V ) : sin B.

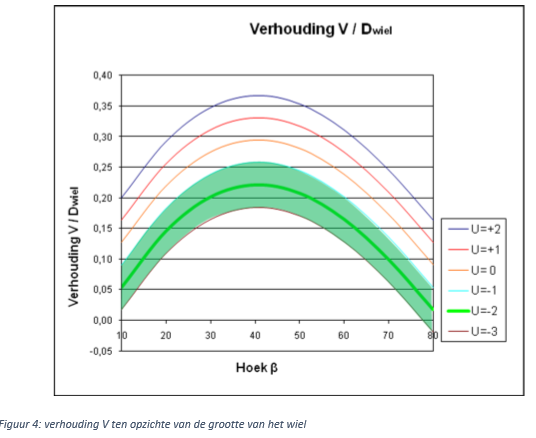
Met behulp van de vorksprong en de diameter van het wiel, kan de Stabiliteitsindex U worden uitgerekend. Als deze stabiliteitsindex zich tussen de -1 tot -3 is, zie Figuur 3 en 4, heeft het voertuig een stabiel stuurgedrag.

Naast de naloop en de stabiliteitsindex, is ook de gewichtsverdeling op het voertuig van belang. Hoe hoger het zwaartepunt zich bevindt, hoe meer tijd nodig is om te kunnen sturen. Daarnaast geldt: hoe meer gewicht op het voorwiel, hoe sneller het voertuig reageert op verdraaiingen van het stuur.
Bij driewielers kan er voor gekozen worden om één of twee sturende wielen te hebben. Bij twee sturende wielen ontstaat er vaak energieverlies doordat de wielen niet evenwijdig lopen. Zo kunnen de wielen te veel naar binnen of naar buiten wijzen, beiden zorgen voor instabiel stuurgedrag en snelle slijtage van de banden.
Indien de driewieler één sturend voorwiel heeft, dient de voorvork een grote vorkdoorbuiging te hebben. Als deze klein is, is de naloop groot waardoor het stuurkarakter erg stabiel is, maar er een grote stuuruitslag nodig is om een bocht te kunnen maken.
Indien er wordt gekozen voor voorwielbesturing en –aandrijving, is het van belang dat de trapkracht niet wordt afgebracht op de besturing. Om de invloed van de trapkracht op de besturing te verminderen dient het balhoofd 0° of 90° te zijn, als compromis zijn echter balhoofdhoeken van 45-60 graden gekozen. Door de balhoofdhoek zal er echter voorloop ontstaan.
Eisen:
- Het voertuig moet naloop hebben
- De stabiliteitsindex van het voertuig dient zich tussen de -1 en -3 te bevinden.
Bronnen:
http://www.velofilie.nl/besturing.htm
De te downloaden informatie over de besturing is terug te vinden in de link hieronder.
Maak jouw eigen website met JouwWeb